อัลกอริทึมตัวกรองดิจิตอลสำหรับการลดทอนสัญญาณรบกวนในระบบการวัดการแกว่งของเครน
คำสำคัญ:
การควบคุมต้านการแกว่ง, การควบคุมเครน, การแกว่งของเครน, ตัวกรองดิจิตอล, ตัวกรองแบบเวียนเกิดบทคัดย่อ
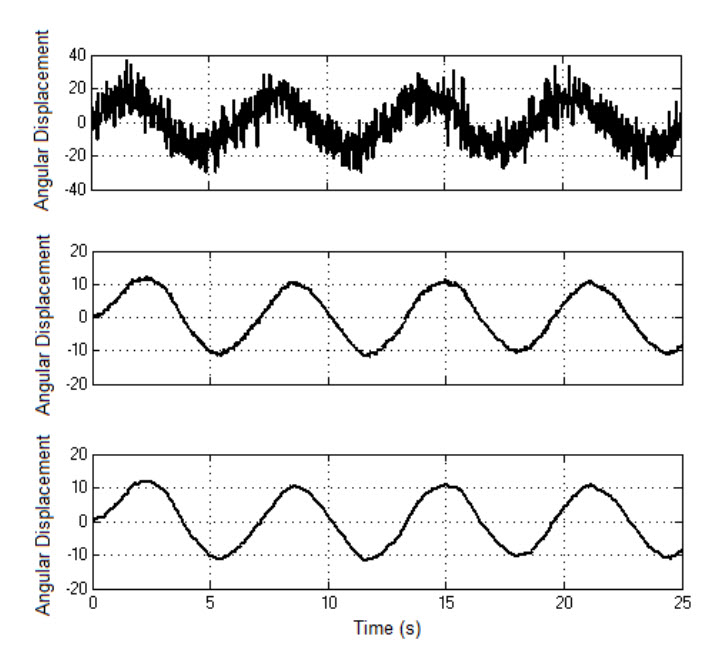
ในการควบคุมเครนเพื่อทำการเคลื่อนย้ายวัตถุจากตำแหน่งหนึ่งไปยังอีกตำแหน่งหนึ่งโดยทำให้เกิดการแกว่งตัวในระบบเครนน้อยที่สุดนั้น ข้อมูลที่บ่งบอกถึงการเคลื่อนที่ของเครนเป็นสิ่งสำคัญอย่างยิ่งต่อกระบวนการควบคุม ทั้งนี้การได้มาซึ่งข้อมูลการวัดที่ถูกต้องจะช่วยให้การประมวลผลการควบคุมทำได้อย่างมีประสิทธิภาพ อย่างไรก็ตามข้อมูลการวัดการเคลื่อนที่ของเครนซึ่งมักจะอยู่ในรูปแบบของสัญญาณไฟฟ้าที่ได้จากเครื่องมือวัดอิเล็กทรอนิกส์จะมีสัญญาณรบกวน (noise) ปนมาด้วยเสมอ หากระดับของสัญญาณรบกวนมีค่ามากจะทำให้การประเมินการแกว่งในระบบเครนผิดพลาดได้ ดังนั้นงานวิจัยนี้จึงมุ่งศึกษาการสร้างอัลกอริทึมตัวกรองดิจิตอลแบบเวียนเกิด (recursive digital filter algorithm) เพื่อใช้ในการกำจัดสัญญาณรบกวนออกจากสัญญาณการวัดการแกว่งที่ได้จากเครื่องมือวัด การทดสอบอัลกอริทึมดังกล่าวกับสัญญาณรบกวนจำลองแสดงให้เห็นว่าสัญญาณรบกวนส่วนใหญ่ถูกลดทอนให้น้อยลงอย่างมาก การลดทอนสัญญาณรบกวนด้วยวิธีการทางซอฟแวร์ (software filtering) ในลักษณะนี้ทำให้ไม่จำเป็นต้องสร้างวงจรอิเล็กทรอนิกส์เพิ่มเติมเพื่อกรองสัญญาณรบกวนสำหรับระบบควบคุมเครน ซึ่งมีประโยชน์ในแง่ของการลดความซับซ้อน (complexity) ของฮาร์ดแวร์ในระบบควบคุมเครนลง
เอกสารอ้างอิง
Hyla. P., 2015. Night Vision Applicability in Anti-Sway Vision-Based Solution. Proceedings of the 2015 20th International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, pp. 358-363.
Kawai, H., Kim, Y.B. and Choi, Y., 2011. Measurement of a container crane spreader under bad weather conditions by image restoration. IEEE transactions on instrumentation and measurement, 61(1), pp.35-42.
Kim, Y., Yoshihara, H., Fujioka, N., Kasahara, H., Shim, H., and Sul, S., 2003. A New Vision-Sensorless Anti-Sway Control System for Container Cranes. Proceedings of the 2003 IEEE Industry Applications Conference, pp. 262-269.
Ahmad, M.A., Raja Ismail, R.M.T., Ramli, M.S., and Hambali, N., 2010. Analysis of IIR Filter with NCTF-PI control for sway and trajectory motion of a DPTOC System. Proceedings of the 2010 International Conference on Electronic Devices, Systems and Applications, pp. 54-58.
Ahmad, M.A., Misran, F.R., Ramli, M.S., and Raja Ismail, R.M.T., 2010. Experimental investigations of low pass filter techniques for sway control of a gantry crane system. Proceedings of the 2010 2nd International Conference on Electronic Computer Technology, pp. 1-4.
Enin, S.S. and Omelchenko, E.Y., and Beliy, A.V., 2018. Crane Anti-Sway Control System with Sway Angle Feedback. Proceedings of the 2018 International Conference on Industrial Engineering, Applications and Manufacturing, pp. 1-5.
Hamming, R.W., 1998. Digital filters. Courier Corporation.
Chen, H.C. and Chen, S.W., 2003. A moving average based filtering system with its application to real-time QRS detection. Computers in Cardiology, IEEE, pp. 585-588.
Grout, I., 2011. Digital system design with FPGAs and CPLDs. Elsevier.
Khan, I. R., Okuda, M., and Ohba, R., 2003. New Designs of Frequency Selective FIR Digital Filters. Proceedings of the 2003 International Symposium on Circuits and Systems, Bangkok, Thailand, pp. 165–168.
Zeng, Z., Chen, Y., and Wang, Y., 2006. Optimal Design Study of High-Order FIR Digital Filters Based on Neural-Network Algorithm. Proceedings of the Fifth International Conference on Machine Learning and Cybernatics, Dalian, China, pp. 3157-3161.
Okatan, A., and Aydemir, M. E., 2007. Design and Implementation of a Precision Accelerometer by Recursive Filtering for Spacecraft Instrumentation. Proceedings of the 3rd International Conference on Recent Advance in Space Technologies, Istanbul, Turkey, pp. 444-447.
ดาวน์โหลด
เผยแพร่แล้ว
รูปแบบการอ้างอิง
ฉบับ
ประเภทบทความ
หมวดหมู่
สัญญาอนุญาต
ลิขสิทธิ์ (c) 2024 วารสารวิศวกรรมเครื่องกลไทย

อนุญาตภายใต้เงื่อนไข Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
วารสาร TCI อยู่ภายใต้การอนุญาต .................
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------


